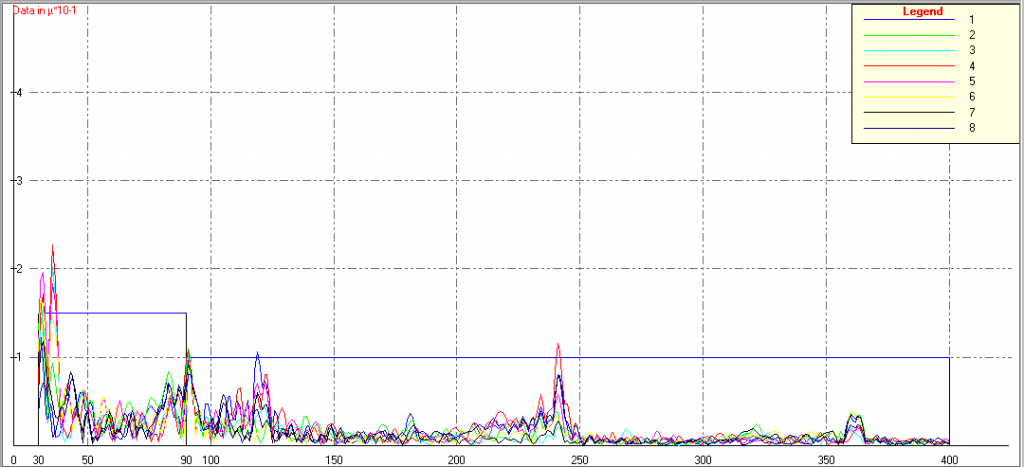
在我们最近的时事通讯和博客文章中,我们一直在讨论Lobing和Chatter测量。根据定义,Lobing在有限的角度窗口上查看圆度数据;我们的标准FFT Chatter Analysis可分析完整的360度数据。但是,当存在非连续的聊天模式时,将分析集中在数据集的较小部分上会很有用。当在100%的数据上执行分析时,在小角度范围内发生的信号可能看起来具有较低的幅度。通过将分析限制在特定的角度范围,您可以更准确地表示颤振幅度。用于FFT颤振分析的Adcole软件包包含用于查看有限角度范围的选项,包括轴颈和凸轮轴凸角。为了进行适当的分析,您必须确保使用足够宽的扇区。扇区太小会导致结果失真和/或UPR判定不佳。 Adcole的服务部门可以帮助您选择此选项。 如果您有兴趣设置FFT颤振分析的有限角度范围,请联系我们的服务部门+ 1-508-485-9100
wmasterAugust 23, 2018