因为平行度误差的坐标取决于零件相对于应变计元件的位置,所以一些操作者可能会发现这种混淆。这篇文章有助于澄清一些关于并行性的常见问题。首先,我们定义Parallelismo,然后讨论坐标系。
定义
期刊并行性基于期刊的两个外部切割的径向测量。计算将切割3的最小二乘中心(LSC)与切割1的LSC进行比较,以确定R定轴颈的轴,然后将该轴颈轴与参考轴进行比较。 
期刊平行度可能受期刊宽度或外部切割之间的距离影响。并行性不受期刊半径的影响。可以相对于零件轴分析线性扫描数据, 期刊平行度可能受期刊宽度或外部切割之间的距离影响。并行性不受期刊半径的影响。可以相对于零件轴分析线性扫描数据D0↩供替代的并ࢄ度计算。
输出选项
一旦测量了轴颈平行度,就可以用两种不同的方式查看输出误差 - 绝ֹ平ࢌ度值,包括它出现的角度,或X和Y平行度值。第一种方法给出了并行性的向量分量;第二种方法给出了并行性的各个组成部分。
坐标系
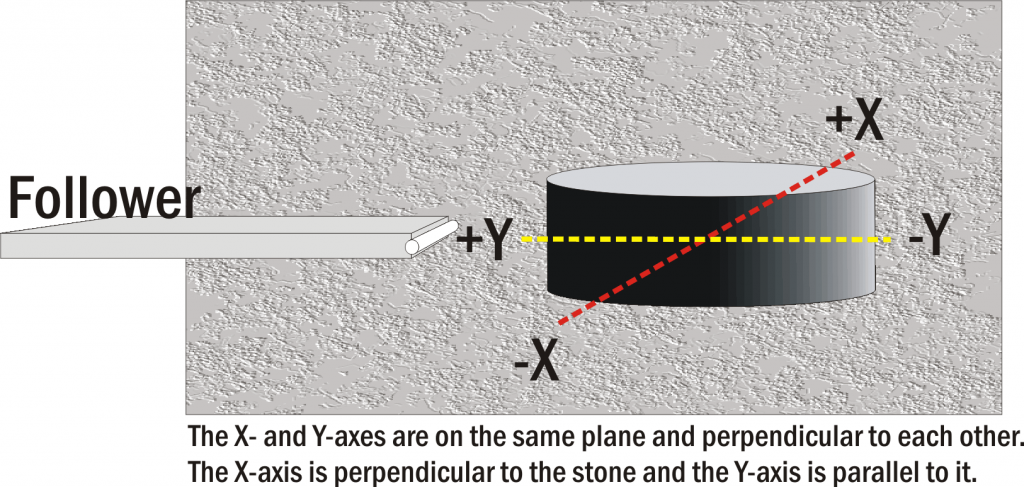
Adcole已经为当前版本的软件指定了坐标系,5982↩下所示 - 当y轴延伸并且x轴垂直于该跟随行程时,y轴与从动件一致。
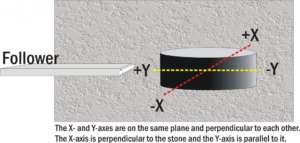
当从旋转轴观察时,正x从旋转轴移动到石头中,正y从旋转轴移动到从动件中。
当以逆时针旋转或顺时针旋转测量曲轴时,5750↩标是相同的。
零件的方向是主轴端的主1和尾座端的主N.
倒置零件
虽然倒置系统在坐标系统的显示方式上有所不同,4F46↩↪LOHAN_65E论应变计中的零件方向如何,输出结果都保持一致。测量倒转部件的旋转方向与旋转方向相同,就像将部件放置在测量仪中一样,主轴1位于主轴箱上。该软件在计算并行度时会考虑此信息并报告相同的输出。
测量平行度时要小心
零件中心的问题可能会影响并行性
并行性可能受驱动程序问题的影响
如果您对并行性或我们的其他测量功能有疑问,请致电1 800 858 5802或发送电子邮件至Sales@adcole.com与Adcole联系。坐标系