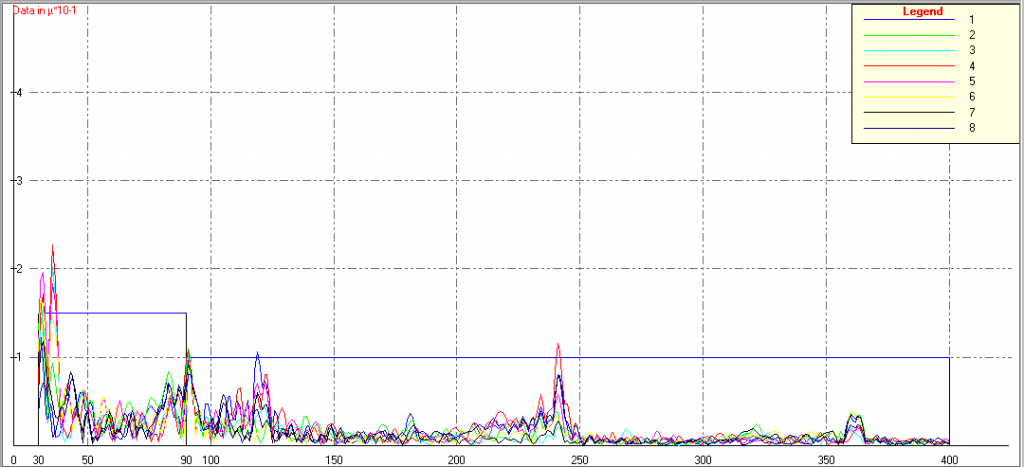
在我们最近的时事通讯和博客文章中,我们一直在讨论Lobing和Chatter测量。根据定义,Lobing在有限的角度窗口上查看圆度数据。我们的标准FFT Chatter可分析完整的360度数据。但是,当存在非连续的聊天模式时,将分析集中在数据集的较小部分上会很有用。当在100%的数据上执行分析时,在小角度范围内发生的信号可能看起来具有较低的幅度。通过将分析限制在特定的角度范围,您可以更准确地表示颤振幅度。用于FFT颤振分析的Adcole软件包包含用于查看有限角度范围的选项,包括轴颈凸轮和轴凸角。为了进行适当的分析,您必须确保使用足够宽的扇区。扇区太小会导致结果失真和/或UPR判定不佳。Adcole的服务部门可以帮助您选择此选项。 如果您有兴趣设置FFT颤振分析的有限角度范围,请联系我们的服务部门+ 1-508-485-9100
7月14日、NASAのニューホライズン宇宙船は、冥王星の表面を8000マイル離れた冥王星の表面を通した9½年后に、30億マイルの旅を終えました。この宇宙船は過去10年間をかけて、太陽系の最初の「調査」を完成し、冥王星、その最大の月のカロン、および冥王星の環境の画像とデータを収集しました。 Adcoleは、このような歴史のなプログラムの一部であることを非常に誇りに思っています。Newizは、Fine SensorとSpinセンサーモジュールで構成された完全冗长Adcole Sun Sensor Systemを搭載しています。冥王星システムへの9・1/2年の旅の間、ニューホライズン宇宙船はスピン・サンセンサー機能に依存してスピンが安定していた。近接アプローチとフライビーの间、ファインサンセンサーを利用してNew地平线"(Horizons)计划是由美国国家航空航天局(NASA)的科学家们提出的,宇宙船是冥王星和查龙的象征。ニューホライズンのための太阳传感器系统の设计における重要な課題の1つは、ミッションの过程で太陽強度の大きなダイナミックレンジでした。 1000:1のダイナミックレンジで成功したパフォーマンスはすでに冥王星の出会いと共に発生しています。今后のKuiper Belt Object(KBO)の出会いは、さらに大きなダイナミックレンジを伴います。
巫师8 月 23, 2018
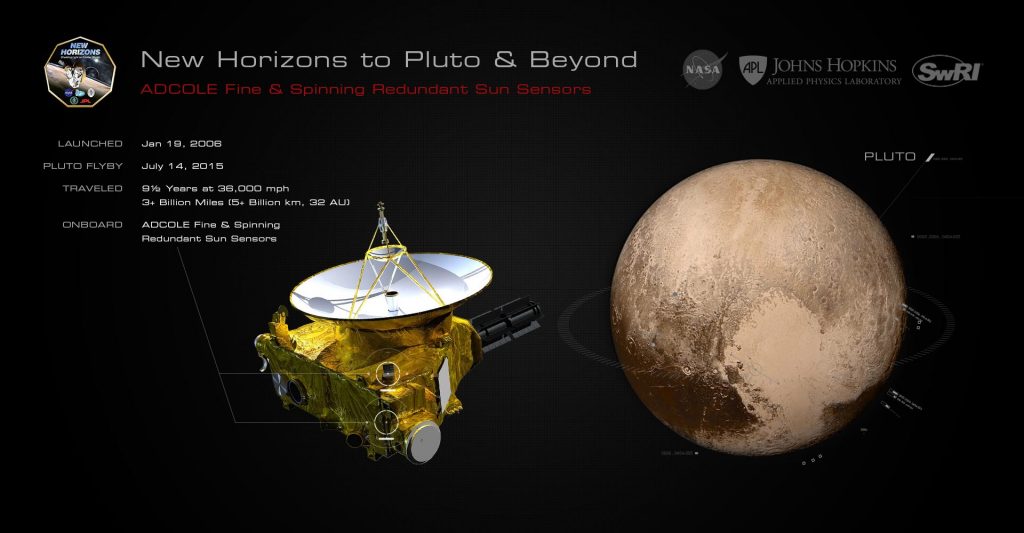
7月14日,美国宇航局的新视野号太空船经过我们太阳系的9年半,30亿英里的旅程,在冥王星的8,000英里范围内通过。太空船在过去的十年里完成了太阳系的第一次 "调查",收集冥王星,其最大的卫星Charon和冥王星的环境的图像和数据,因为它继续以超过每小时30。000英里的速度穿越太空。 Adcole非常自豪能成为这样一个历史性项目的一部分----。新地平线太空船配备了完全冗余的Adcole太阳传感器系统,包括精细传感器和旋转传感器模块。在冥王星系统的9年半旅程中,新地平线航天器依靠旋转太阳传感器功能旋转稳定。在近距离接近和飞越期间,NewHorizons平台采用精细太阳传感器进行3轴稳定。除了这些 "常规 "任务之外,当太空船通过冥王星和卡戎时,Adcole的太阳传感器也被NASA科学家用作科学仪器,以执行各种测量和读数。 设计新视野太阳传感器系统的一个重大挑战是在任务过程中太阳强度的大动态范围。冥王星遭遇时已经在1000:1的动态范围内成功表现。即将到来的柯伊伯带对象(KBO)遭遇将涉及更大的动态范围。
巫师8 月 23, 2018
パート1 から引き続き 前述のように、Adcoleゲージのロービング測定では、丸めデータの限られたセクタ内で大ピーク間振幅が示されます。差異が繰り返し起伏の一部であるか、単一のインスタンスイベントであるかは問題ではありません。一方、AdcoleChatter測定は、反復信號の特定のUPRと振幅結果を見つけるために使用されます。その場合、UPRコンポーネントを使用して原因を追跡し、その原因となった特定の機械を特定することさえできます。各測定には长所と短所があります。FFT Chatter解析は、測定データの周期のなパターンを特定し、異なる重複信号をUPRと振幅成分に分離することができます。ただし、不連続パターンの振幅を判断する能力には限界があり、スクラッチやフラットスポットなどの単一のインスタンスイベントを特定するための適切なツールではありません。一方、ロービング測定は、測定ウィンドウ内の最大の山と谷を報告することができるため、フラットスポット、スクラッチ、または非クリーンアップの小さなセクターのようなものを見つけるのに適しています。しかし、ロービングの場合、360以上のウィンドウを計算せずに様々な周波数を分離する実際的な方法はありません。それでも、ピークからピークまでの振幅全体が特定の攻撃の頻度の結果であると仮定しています。実際には、多数の周波数成分が存在する可能性があり、重複し、合計振幅から加算または減算する可能性がある。ロビングは、データセット全体に適用されるものよりも厳しいウィンドウに許容範囲を適用することによって、限られた角度範囲にわたってデータの急激な変化を検出するのに最適です。たとえば、仕様では6ミクロンの丸ロービング仕様は、ジャーナル内のステップやスクラッチなどの単一発生の異常を検出するのに有効です。Chatterは、粉砕装置の振動信号を示す繰り返しパターンや、粗い操作パターンがまだ存在する(クリーンでない)状況を見つけるのに役立ちます。両方のタイプのエラーは、クランクシャフトに機能上の影響を及ぼします。チャタリングとロービングの适切な組み合わせは、原因を突き止めて診断するのに役立ちます。しかし、2つの仕様は相補のであり、一方は他方を完全に置き換えることはできます。いつものように、私たちは、このや他の投稿に関するお客様の考えを歓迎します。この情報とは異なる、あるいはあなたの経験から学んだことは何ですか? 注:Adcoleは今月オンラインビデオトレーニングを発表しています。まだ投稿を読んでいない場合は、こちら
巫师8 月 23, 2018
续第1部分 如前所述,Adcole量具上的叶片测量显示了有限的扇形圆度数据中的最大峰值幅度。如果差异是重复波动或单个实例事件的一部分,则无关紧要。另一方面,Adcole Chatter测量用于找到重复信号的特定UPR和幅度结果。然后可以使用UPR组件来追踪原因,甚至可以识别导致它的特定机器。每种测量都有优点和缺点。FFT Chatter分析旨在识别测量数据中的循环模式,并且可以将不同的重叠信号分离成它们的UPR和幅度分量。然而,它在确定非连续模式的幅度方面是有限的,并且不是定位单个实例事件的正确工具,例如划痕或平点。另一方面,波瓣测量可以报告测量窗口内的最大峰值和谷值,因此更适合于找到像平点,划痕或小部分非清理的东西。然而,对于波瓣,没有实际的方法来分离各种频率而不计算360或更多窗口。即使这样,你也会假设整个峰顶的幅度是特定违规频率的结果。实际上,可能存在多个频率分量,这些频率分量重叠并且可以从总幅度中加或减。Lobing最适用于检测有限角度范围内数据的快速变化,方法是对窗口应用比应用于整个数据集的容差更严格的容差。例如,您的规格可能允许6微米的圆度误差,但在30度窗口中将误差限制在不超过2微米。 提示规范对于查找单个出现的异常(例如期刊中的步骤或划痕)是有效的。Chatter对于查找指示研磨设备中的振动信号的重复模式或者仍然存在粗略操作模式的情况(非清理)更有用。两种类型的误差都对曲轴具有功能意义,并且颤振和波瓣测量的正确组合可以帮助捕获和诊断原因。但是,这两个规范是互补的,不能完全替代另一个。与往常一样,我们欢迎客户对此以及任何其他帖子的想法。您从您的经验中学到了哪些不同或增加了这些信息? 注意:Adcole本月宣布在线视频培训。如果您尚未阅读我们的帖子,您可以查看此处。
巫师8 月 23, 2018
今では、Adcoleが新しい製品やサービスを導入するために行っている変更の一部について聞いたことがあります。今日、Adcoleオンラインビデオトレーニングについて教えてください。私は、あなたの従業員がAdcole機器の操作とメンテナンスを訓練する効果的な新しい方法であると信じています。オンサイトトレーニングの費用よりも少ない金額で、従業員はトレーニングプログラムに一年間アクセスすることができます。 当社の新しいトレーニングプログラムは、Adcole機器のメンテナンス、プログラミング、および運用において従業員を訓練するために使用および再使用できるオンラインビデオトレーニングクラスで構成されています。ビデオはタスクベースで平均3〜5分です。研修生はすぐに効果が出るように設計されています。これは、タスクが数ステップに短縮され、簡単に学習されるためです。部品のプログラミングやメンテナンスを行う前に、ゲージマニュアル全体を習得する必要はなくなりました。ステップバイステップの手順は、研修生を各タスクの完了まで導くものです。さらに、ビデオは必要に応じて頻繁に参照することができます。このサービスを使用して新入社員を養成したり、思い出をリフレッシュすることができます。メモは必要ありません。 Adcole Online Video Trainingは、他の国の従業員を訓練したり、 高い従業員の離職率に対処するための非常に 費用対効果の高いをクリックします。 私たちのサイトは生きていますので、 AdcoleTraining.com をご覧ください。導入ビデオを見てから、トレーニングモジュールのページに進み、最初のビデオレッスンのリストをご覧ください。グラフィックスは最小限に抑えられており、モバイルデバイスで表示したい人のデータコストを削減できます。 翻訳ボタンは、右上と右下にあります。あなたがサイトにいる間、トレーニングニュースレターに登録して3つの無料のトレーニングビデオを入手してください(これはAdcoleのニュースレターとは別のものです。メニューを使用するか、 ここ に移動してください。 John LegerとHolly Dionに感謝します。彼らはこのプロジェクトのビデオを制作しています。彼らが製作したコンテンツは、Adcoleゲージを最大限に活用するのに役立ちます!...
巫师8 月 23, 2018

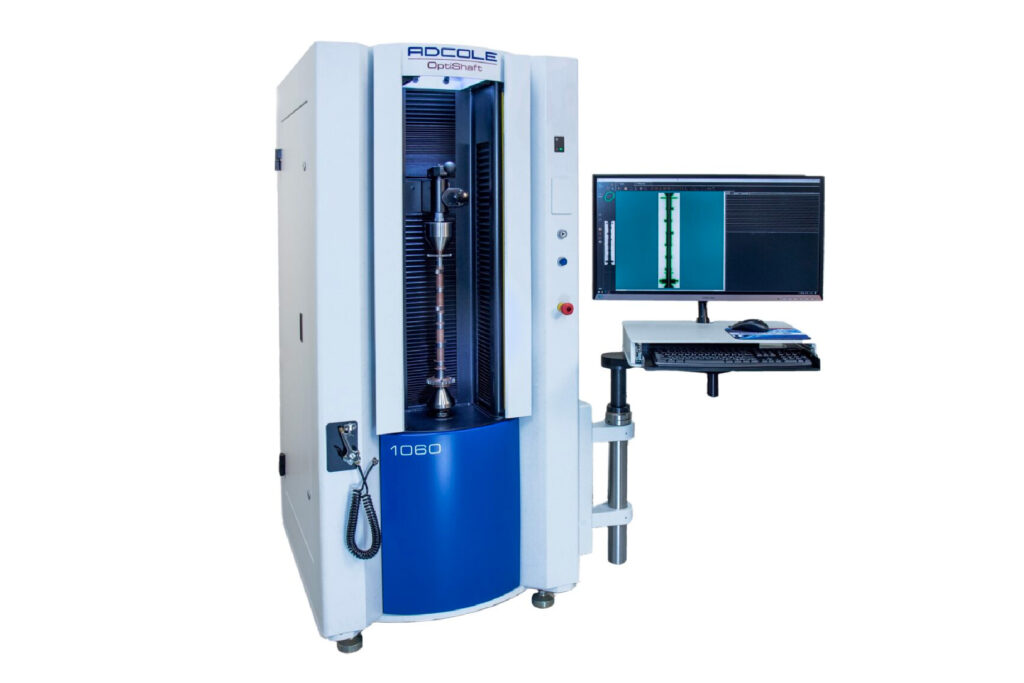
チャールズD.ベイカー知事は、2015年8月27日木曜日にAdcole Corporationを訪問し、Jay Ash、連邦住宅経済開発局長官、およびいくつかのチームメンバーを同席しました。訪問の目的は、Adcoleの製品開発と品質に対するコミットメントを認識して、現地従業員をより効率的かつリーンな製造技術で訓練するための95,000ドルの州補助金の基礎を形成することでした。 1957年に設立されたAdcoleは、自動車メーカーやサプライヤーがカムシャフト、クランクシャフト、ピストンの品質を制御するために世界中で使用されている精密測定機を製造しています。 Adcoleゲージは、高性能で低燃費のエンジンの需要増加に対応するために、メーカーがサブミクロンの許容誤差を達成できるようにします。 Adcoleの航空宇宙部門は、ミッションクリティカルな位置付けと制御を提供する太陽センサを製造しています。地球を周回するすべてのGPS衛星に搭載されるほか、NASAのニューホライズン宇宙船を安定化させ、案内しました。9-1 / 2年後に冥王星の表面を8,000マイル以上通過しました。 Adcole社のJ. Brooks Reece社長は次のように述べています。「Adcole Corporationは、マサチューセッツ州のハイテクメーカーにとって最高の製品であると信じており、弊社の勤勉な人々、歴史、先端製品を誇りに思っています。 Adcoleは、カムシャフト、クランクシャフト、ピストン、宇宙衛星用のデジタル太陽角度センサーを測定する世界最高精度の機械を設計し製造するための世界的な専門技術センターです。 Adcole Corporationは信頼できる精度を提供することで認められています。...
巫师8 月 23, 2018